研究テーマ | Research theme
パルス幅変調された出力矩形波電圧位相補償を用いた高周波信号電圧重畳によるIPMSMエンコーダレスべクトル制御
A new phase error compensation of the pulse-width modulated square wave output voltage for encoder-less IPMSM control by means of high frequency signal voltage injection
研究概要 | Research summary
極低速域のIPMSMのエンコーダレスベクトル制御では,駆動用とは別に回転子位置推定用の信号電圧・電流を加える必要があります。本研究ではパルス幅変調を用いて信号電圧を加え(変調),その信号電圧に対する応答電流のみを抽出(復調)する方法としてキャリア同期信号電圧重畳方式に取り組んでいます。キャリア周期ごとに出力される矩形波電圧は振幅誤差に加え位相誤差を含んでおり,特に本エンコーダレス方式では位相誤差の補償が必要です。そこで,出力電圧誤差および矩形波出力電圧位相を同時に実現する方式を提案しています。
In the standstill or very low speed operation, a signal voltage or current injection is required to estimate the rotor position for IPMSM encoder-less vector control. In this study, the PWM carrier synchronized signal voltage injection method has been addressed. The modulated voltage contains not only the amplitude error but also the phase error. Especially, the phase error has a negative effect on the signal current extraction. Therefore, a new compensation method for the amplitude and phase errors of the modulated output voltage has been proposed.
特色・研究成果・今後の展望
- 新しく汎用の制御装置のみで,出力電圧矩形波の位相誤差を補償する方式を提案しました。
- 実機にて検証し,提案する出力電圧誤差補償法を用いて電圧歪みが低減し,その結果電流歪みが低減することを示しました。
- 本方式の有用性およびその実験結果は電気学会の英文論文誌において掲載されました(以下に論文掲載の出力電流波形改善の定量的結果を示します)。
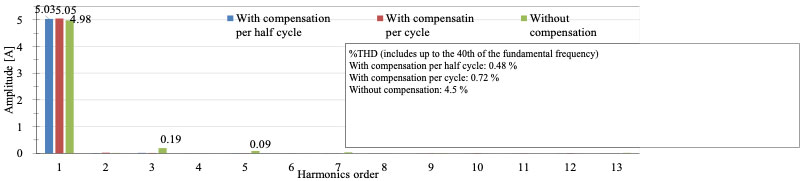
図 出力電流のフーリエ級数展開結果(実験結果)
(青・補償なし,赤・キャリア周期ごとの補償,緑・キャリア半周期ごとの補償)
社会実装への展望
本研究は,センサの精度やAD変換器の精度,PWMカウンタの時間分解能の向上などによって,さらに本手法の研究が展開すると考えています。センサ開発やFPGAの動作周波数を上げる場合,本技術の応用を期待しています。
企業の方へ:
高精度なセンサ技術の有効な活用を考えていらっしゃる方や高精度エンコーダレスIPMSM制御のアプローチとして出力電圧誤差補償の精度向上を考えていらっしゃる方にとって,本技術の応用が期待できます。