研究テーマ | Research theme
AT-NPC 3レベルインバータによるエンコーダレス回転機駆動制御
Encoder-less motor drive system with 3-level AT-NPC inverter
研究概要 | Research summary
出力電流リプルが小さく,スイッチング損失を低減できる3レベルAT-NPCインバータによる高精度な回転子位置エンコーダレス制御を実現します。トルク瞬時値を制御するベクトル制御では回転子位置の推定が必要であり,推定において特に低速域では指令電圧値に対して出力電圧が歪んでしまい推定精度が落ちてしまいます。本研究で提案する出力電圧歪みを低減する手法によって,広い速度範囲で位置推定精度を維持したエンコーダレス制御を実現できます。
3-level AT-NPC inverter, which realizes the output current ripple to be smaller and reduces the switching-losses, is applied to encoder-less motor drive system in this study. Encoder-less vector control for motors requires the estimation of the rotor position. However, in the low-speed region particularly, the output voltage deviates from its reference voltage, which ruins the accurary of the estimation. In this study, a new accurate compensation method of the output voltage error has been proposed to realize the encoder-less vector control in wide speed range.
特色・研究成果・今後の展望
- AT-NPCインバータドライブ回路から電圧・電流センサまですべてパーツを購入し自作しています。したがって,これらの改良を必要に応じて行うことができます。
- 下に実験装置の写真を示します。実験機ですので,大きな面積をとっていますが,スイッチング素子はモジュール化されており,周辺回路と合わせて変換器の小型化は可能です。
- 回路シミュレーションソフトを用いて,新しい制御法や回路構成のアイディアをまず検証しています。
- 実験に当たり,DSPの制御プログラムの作成・およびHDLを使ってFPGAのロジック合成をしています。
- 2019年1月に本テーマに係り「3レベルAT-NPCインバータによる誘導電動機速度センサレス駆動システムの制御方式の検討」と題する学会口頭発表を行い,電気学会優秀論文発表賞B賞を受賞しました。
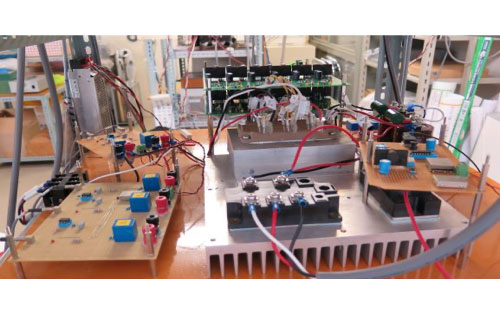
AT-NPC3レベルインバータの外観
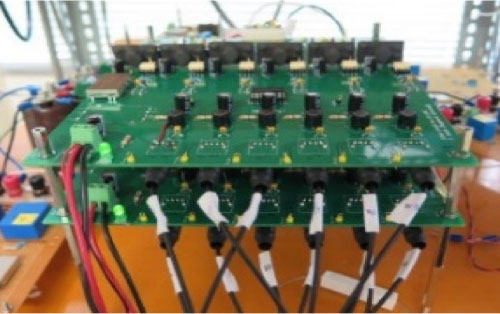
自作ゲートドライブ回路
社会実装への展望
本研究では,従来比較的大きな容量のモータでしか適用されてこなかったマルチレベルインバータを低・中容量のモータへの適用拡大を進めることを期待できます。
企業の方へ:
3レベルインバータでのエンコーダレスベクトル制御の適用事例が少なく,本研究の知見を企業における技術開発に応用できると考えています。