研究テーマ | Research theme
電位のスイッチングで油滴やヒドロゲルを動かす
Driving the locomotion of oil droplets and hydrogels in water by electrode potential switching
研究者 | Researcher
諸岡 哲朗
Morooka Tetsuro
横浜国立大学
大学院工学研究院
助教(共同研究者)
王 博
輪島 礼子
森下 輪太郎
宇都宮 貢
(研究協力大学院生)
研究概要 | Research summary
水中の伝導体表面を自在に這動する油滴やレドックス活性ヒドロゲルを,「分子ロボット」として構築することを目指します。液滴は,エレクトロ・ウェッティングの手法で接触角を可変でき,焦点可変レンズなどとして働くことが知られています。我々は,格段に低電圧で,かつ側方移動も可能にすることを狙っています。また,ヒドロゲルを用いた分子ロボットは,生物界最速のスパズモネームの仕組みで,かつアメーバの仮定連動ができるものを構築することが目標です。
いずれも,動的ソフトマターの構築と制御の新しい局面を開拓する研究です。
As a future technology, realization of self-standing soft matter robots locomoting on solid surfaces is in demand. Our aim is at the design, construction, and driving "molecular robots" on electrode surfaces in water. Not only the reshaping or contraction-expansion but also directional crawling are targeted to be controlled by electrode potential switching. The electrowetting technology used for convertible lens needs over 200 V, whereas we have succeeded to more sophisticated control of an oil droplet on a Au surface by less than 1 V. We have newly synthesized a poly amino-acid based viologen pendant hydrogel that exhibits world-top level quick contraction upon reduction. Our targets of developments include mimicking the behavior of Spasmoneme motion and Ameba's pseudopod activity.
To sum up, we are joining the top runners in the future-oriented dynamic soft-matter chemistry and application.
特色・研究成果・今後の展望
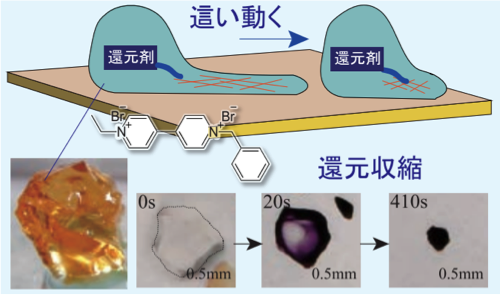
ビオロゲンをペンダントしたポリアミノ酸ポリマーを架橋したヒドロゲルを合成・開発しました。これを水中で還元したところ,410秒で体積が初めの3%まで収縮しました。実験データ(動画の一部)を下段左に示しています。透明薄黄色である酸化状態から,急速還元して濃い紫色に変化するとともに収縮したことがわかります。世界トップレベルの動きの速さと収縮率に迫るデータです。これを生かした分子ロボット駆動体を作る研究を進めています。そのイメージも,下段左に示しています。1 mmほどのサイズで,1 V程度の電位駆動で,方向性を持って動く分子ロボットが目標です。
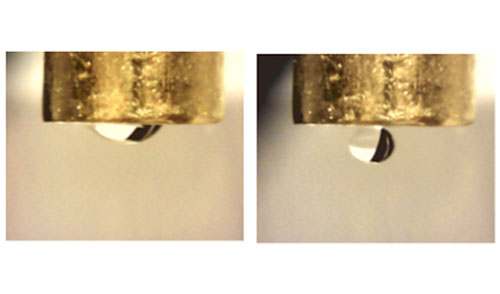
従来は200 V以上必要だったエレクトロ・ウェッティングによる油滴の展開と球形化の繰り返しプロセスを電気化学系で1 Vで制御できるようになり,制御因子も次々と明らかになっています。下段左の図は,Au電極の底面に水中で付着した油滴が,電位に瞬時に応答して接触角を変える例です。共存イオンや吸着種で電位駆動を可変する手法も見出しました。動きに方向性を与え,自在に板上で動かせるテクニックを開発し,「油滴もロボットとして働きうる」ことを示すことが目標です。
社会実装への展望
本研究の成果は,人が近づけない場所や狭い空間において,窓・センサ・冷却設備・電池に着く不要な液滴を除去する技術,ミクロ液体輸送系内で3次元的に自在に反応性液滴を移動させる技術,バイオフォーリング防止技術,ハイスループットのバイオ医療素子技術に直結します。また,自立した自律性のある分子ロボットの実現に近づきます。
20年先と言われるこの技術をあと5年で先鞭をつける研究を共同して行える企業とのコンタクトを歓迎しています。